Scalable Diffusion Models with Transformers
Introduction
- New class of diffusion models based on transformers, called Diffusion Transformers (DiTs).
- Show that U-Net inductive bias is not crucial for performance.
- Study the scaling behaviour of transformers with respect to network complexity vs sample quality.
Preliminaries
Diffusion Formulation
-
Gaussian diffusion models assume a forward noising process which gradually applies noise to real data. \(q(x_t|x_0) = N(x_t;\sqrt{\bar{\alpha_t}}x_0, (1-\bar{\alpha_t})I\) where constants \(\bar{\alpha_t}\) are hyperparameters.
-
By applying the reparametrization trick, we can sample \(x_t = \sqrt{\bar{\alpha_t}}x_0 + \sqrt{1-\bar{\alpha_t}}\epsilon_t, \epsilon_t \sim N(0, I).\)
-
Diffusion models are trained to learn the reverse process that inverts forward process corruptions:
-
Neural networks are used to predict the stats of \(p_{\theta}\).
-
The reverse process is trained with the varaiation lower bound of the log-likelihood of \(x_0\) which reduces to : \(L(\theta) = -p(x_0|x_1) + \sum_tD_{KL}(q^*(x_{t-1}|x_t,x_0) \ || \ p_{\theta}(x_{t-1}|x_t))\)
-
Since both \(q^* \ and \ p_{\theta}\) are Gaussian , \(D_{KL}\) can be evaluated with their means and co-variances.
-
By reparametrizing \(\mu_{\theta}\) as a noise prediction network \(\epsilon_{\theta}\), the model can be trained using simple mean-squared error between the predicted noise and ground-truth sampled Gaussian noise. \(L_{simple}(\theta) = ||\epsilon_{\theta}(x_t) - \epsilon_t||^2_2\)
-
In order to train diffusion models with a learned reverse process covariance \(\Sigma_{\theta}\), the full \(D_{KL}\) term needs to be optimized.
-
Train \(\epsilon_{\theta}\) with \(L_{simple}\) and \(\Sigma_{\theta}\) with the full \(L\).
-
New images can be sampled by initializing \(x_{t_{max}}\sim N(0,I)\) and sampling \(x_{t-1}\sim p_{\theta}(x_{t-1}|x_t)\) via reparametrization trick.
Classifier-free Guidance
- Conditional models take extra information as input such as class label c.
- The reverse process becomes \(p_{\theta}(x_{t-1}|x_t,c)\), where \(\epsilon_{\theta}\) and \(\Sigma_{\theta}\) are conditioned on \(c\).
-
Diffusion sampling procedure can be guided to sample \(x\) with high \(p(x|c)\) by:
\(\hat{\epsilon_{\theta}}(x_t,c)=\epsilon_{\theta}(x_t,\phi)+s.(\epsilon_{\theta}(x_t,c)-\epsilon_{\theta}(x_t,\phi))\) where \(s>1\) indicates the scale of guidance.
Latent Diffusion Models
- Training in high-resolution pixel space computationally prohibitive.
- Tackle with 2-stage approach:
- Learn an autoencoderthat compresses images into smaller spatial representations with a learned encoder \(E\).
- Train a diffusion mode of representations \(z=E(x)\) instead of diffusion model of images \(x\).
- New images generated by sampling a representation \(z\) from diffusion model and decoding it to an image with the learned decoder \(x=D(z)\).
Design Space
Patchify
- Input is spatial representation \(z\).
- First layer is “patchify:
- Converts spatial input into a sequence of Tokens.
- by linearly embedding each patch in the input.
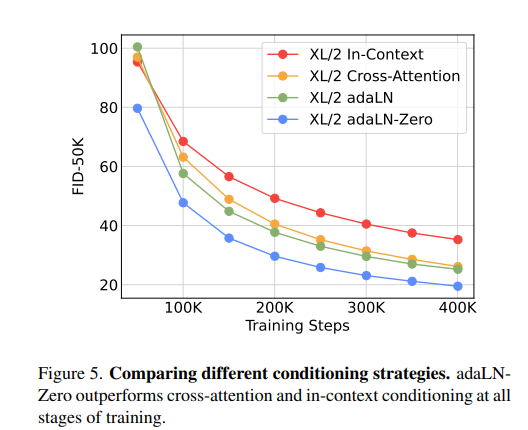
DiT block design
- 4 variants of transformer blocks that process conditional inputs differently:
-
In-context conditioning: Append vectors embeddings of \(t\) and \(c\) as two additional tokens in the input sequence.
-
Cross-attention block: Concatenate embeddings of \(t\) and \(c\) into a length-two sequence. Add a multi-head cross attention b/w this sequence and output of self-attention block.
-
Adaptive layer norm (adaLN) block: Use Adaptive layer normalization. Regress dimensionwise scale and shift params, \(\gamma\) and \(\beta\) from the sum of embedding vectors of \(t\) and \(c\).
-
adaLN-Zero block: Regress dimensionwise scaling parameters \(\alpha\) applied before any residual connection. Initialize the MLP to output zero-vector for all \(\alpha\), initializing the full-DiT block as identity fucntion.
-
Model Size
- A sequence of \(N\) DiT blocks, each with hidden dimension \(d\).
- 4 configs: DiT-S, DiT-B, DiT-L DiT-XL.
Transformer decoder
- DiT gives a sequence of image tokens.
- We need to convert it into output noise and diagonal covariance prediction.
- Use standard linear decoder.
- Apply final layer norm and linearly decode each token into a \(p\times p\times 2C\) tensor, where \(C\) is the number of channels in the spatial input.
- Finally rearrange the decoded tokens into original spatial layout to get predicted noise and covariance.
Experimental Setup
- Models named according to config and latent patch size \(p\), example, DiT-XL/2 refers to the XLarge Config and p=2.
Training
- Train at 256 x 256 and 512 x 512 resolution.
- Imagenet Dataset
- Initialize final layer with zeros and standard weight initialization techiniques from ViT otherwise.
- AdamW.
- Constant learning rate of \(1\times10^{-4}\), no weight decay and batch size of 256.
- Data augmentation - Horizontal flips.
- Maintain exponential moving average(EMA) of DiT weights over training with a decay of 0.9999.
Diffusion
- Off-the-shelf pre-trained variational autoencoder model from Stable Diffusion.
- Downsmaple factor of 8.
- Retain diffusion hyperparameters from ADM (Ablated Diffusion Model).
- Use \(t_{max}=1000\) linear variance schedule ranging from \(1\times10^{-4}\) to \(2\times10^{-2}\).
- ADM’s parameterization of \(\Sigma_{\theta}\)
- ADM’s method for embedding timesteps and labels.
Evaluation
- Frechet Inception Distance (FID)
Experiments
DiT block design
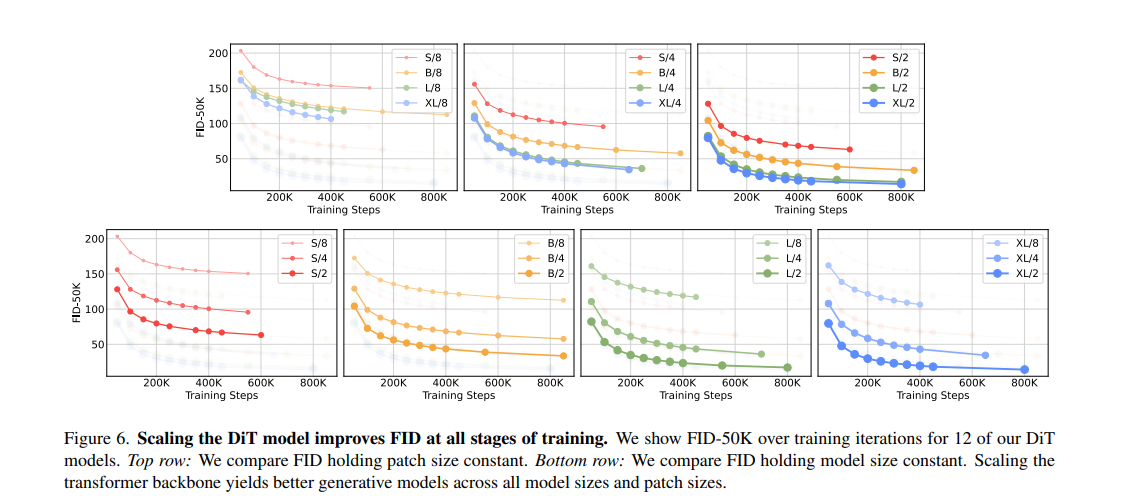
Scaling model size and patch size
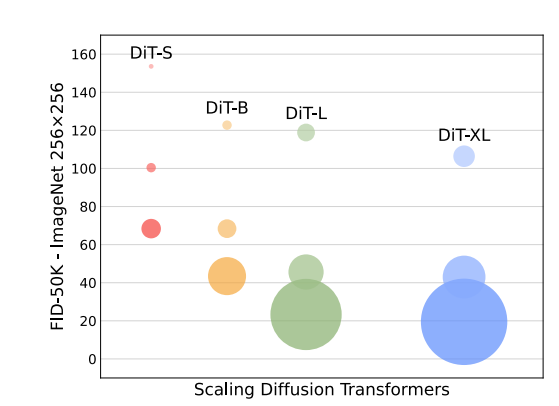
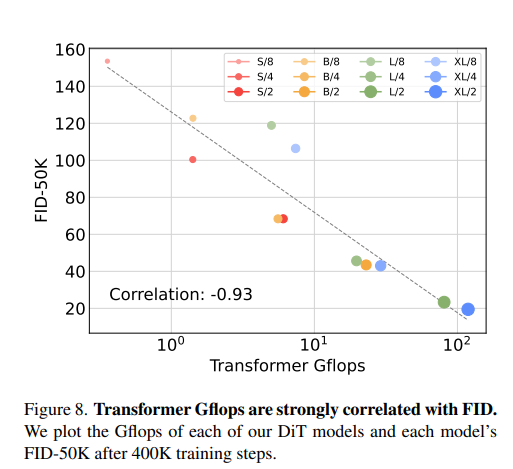
DiT Gflops
- In the exp where model size is constant and patch is decreased, total params are effectively unchanged.
- Only Gflops are increased.
- Indicating that saling model Gflops is key to improved performance.
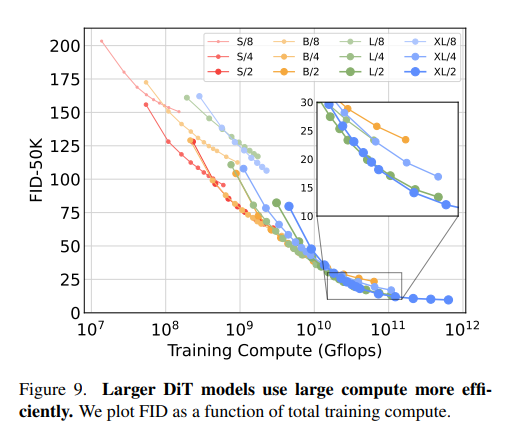
Larger DiT models are more compute-efficient
- Training compute of model:
- Gflops . batch size . training steps . 3
- factor of 3 because backwad pass is twice as heavy as forward.
- Small models even when trained longer, eventually become compute-efficient.
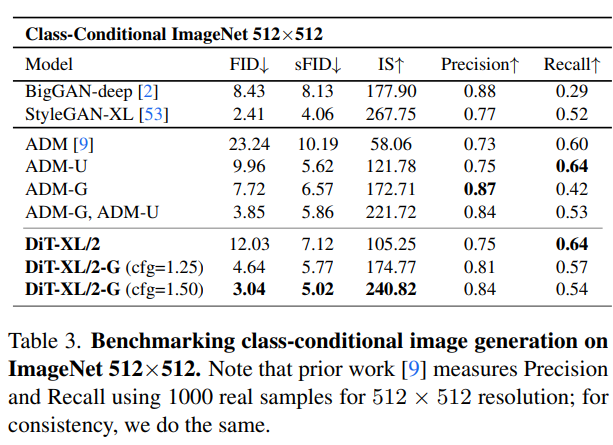
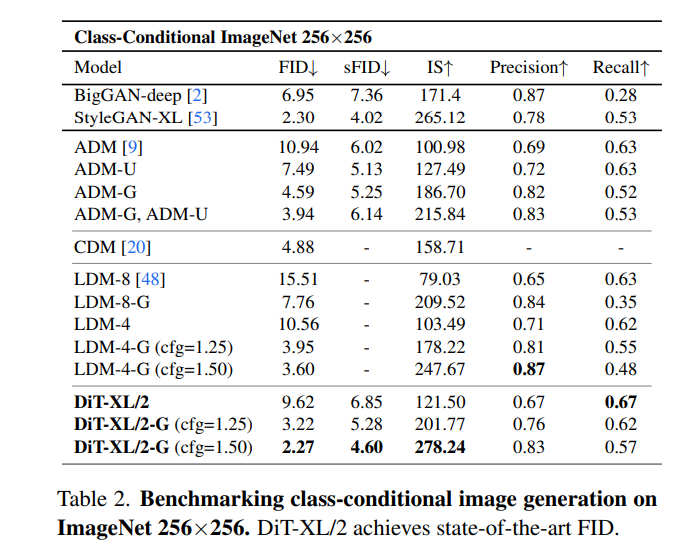
Comparison with State of Art
256 x 256 Imagenet
512 x 512 Imagenet